技研交流
有刷與無刷馬達控制系統簡介
一、有刷馬達與無刷馬達的差異
1.1 由名稱上來區分,一個是有碳刷,一個是無碳刷
1.2 由結構上來看:有刷馬達轉動的是矽鋼片線圈繞組, 磁鐵為固定體不轉動,無刷馬達轉動的是磁鐵,矽鋼片線圈繞組為固定體不轉動
1.3 由接線區分:有刷馬達是正負電源接線,無刷馬達是U V W三線接線,有傳感器的無刷電機還會有一條五芯的信號線(霍爾感應線)

.png)
.png)
.png)
無刷馬達線繞組方式圖
二、有刷馬達與無刷馬達的優缺點
無刷直流馬達的優勢已經不僅在於能提高可靠性,以及降低與碳刷整流相關的雜訊和電氣干擾。雖然有刷馬達主要是由電壓控制,但是無刷直流馬達對電子整流的依賴讓工程師們有機會以更高精度管理轉子位置、速度、加速度,還有馬達的輸出扭矩、效率及其他參數,從而能夠滿足特定的應用需求。
2.1 有刷電機的優點
2.2.1 電機結構簡單,且相關製程成熟
2.2.2 運行平穩,起動 / 制動效果好
2.2.3 電磁力回應速度快,起動扭矩大
2.2.4 僅需控制電壓即可控制轉速,控制器技術門檻低
2.2 有刷電機的缺點
2.2.1 碳刷摩擦聲因大,換向器損耗大
2.2.2 效率低,無效功轉換為熱能,電機容易發熱使用壽命短
2.2.3 因其為接觸式換向,換向過程會產生火花,對電網干擾大
2.2.4 因其效率低,故於同一輸入功率所轉換的輸出動能較小
2.2.5 只能連續工作約5000小時,正常使用壽命為2-3年,壽命低
2.3 無刷電機的優點
2.3.1 無電刷接觸火花、電磁干擾低
2.3.2 運轉噪音低,運轉順暢
2.3.3 沒有接觸性耗損零件,使用壽命長,可以連續工作約20,000小時,常規使用壽命為7 -10年
2.3.4 沒有碳刷及換向片接觸碳化問題,電機免保養
2.3.5 三相換相之控制,爆衝零風險
2.3.6 無刷電機的效能可達85%以上,有刷電機效能約略為55%,故無刷系統更節能
2.4 無刷電機的缺點
2.4.1 無刷電機繞線為三相式接法,電機設計較複雜
2.4.2 控制演算法技術要求高,驅動電路複雜
2.4.3 無刷控制器成本比有刷控制器高
2.4.4 對相位偵測精度要求高,電機量產設備要求高
三、有刷與無刷電機工作原理
3.1 有刷電機工作原理
3.1.1 有刷電機的主要結構就是定子+轉子+碳刷,通過旋轉磁場獲得轉動力矩,從而輸出動能。電刷與換向器不斷接觸摩擦,在轉動中起到導電和換相作用。
3.1.2 有刷電機採用機械換向,磁極(磁鐵)不動,線圈旋轉。電機工作時,線圈和換向器旋轉,磁鐵和碳刷為固定體不轉,線圈電流方向的交替變化是隨電機轉動的換相器和電刷來完成的。
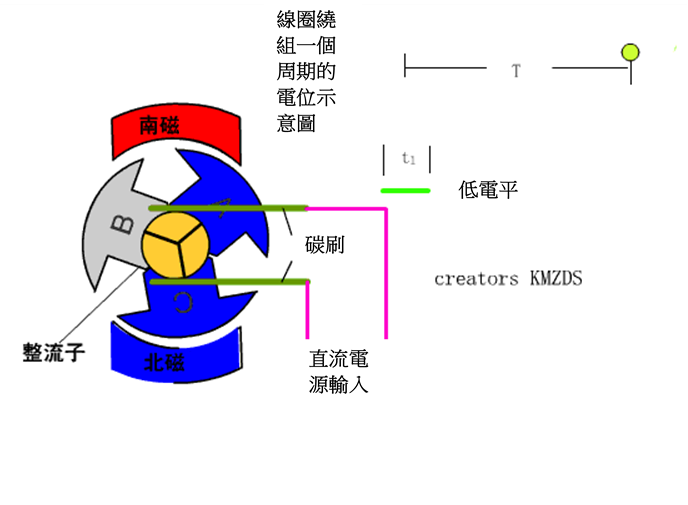
3.1.3 在有刷電機中,這個過程是將各組線圈的兩個電源輸入端,依次排成一個環,相互之間用絕緣材料分隔,組成一個像圓柱體的東西,與電機軸連成一體,電源通過兩個碳元素做成的小柱子(碳刷),在彈簧壓力的作用下,從兩個特定的固定位置,壓在上面線圈電源輸入環狀圓柱上的兩點,給一組線圈通電。
3.1.4 隨著電機轉動,不同時刻給不同線圈或同一個線圈的不同的兩極通電,使得線圈產生磁場的N-S極與最靠近的永磁鐵定子的N-S極有一個適合的角度差,磁場異性相吸、同性相斥,產生力量推動電機轉動。碳電極在線圈接線頭上滑動,像刷子在物體表面刷,因此叫“碳刷”。
3.1.5 碳刷與轉子相互滑動會摩擦,造成碳刷損耗,需要定期更換碳刷,碳刷與線圈接線頭之間通斷交替,會發生電火花,因此產生電磁波干擾電子設備。
3.2 無刷電機工作原理
3.2.1 無刷電機中,換相的工作交由控制器中的控制電路,一般為霍爾感測器(更精密需求的會使用編碼器的技術)+電子換向器,來完成。
.png)
3.2.2 無刷電機採取電子換向,線圈不動而磁鐵旋轉。無刷電機,是使用一套電子設備,通過霍爾元件感知永磁體磁極的位置,根據這種感知,使用電子線路適時切換線圈中電流的方向,保證產生正確方向的磁力來驅動電機,消除了有刷電機的缺點。
3.2.3 上述這些電路,就是無刷電機控制器。無刷電機的控制器還可以實現一些有刷電機不能實現的功能,比如調整電源切換角,制動電機使電機反轉,或是鎖住電機。
3.2.4 無刷直流電機由電動機主體和驅動器(控制器)組成,是一種典型的機電一體化產品。由於無刷直流電動機是以自控式運行的,所以不會像變頻調速下啟動的同步電機那樣,需要在轉子上另加啟動繞組,也不會在負載突變時產生振盪和失步。
四、有刷電機與無刷電機調速方式的區別
實際上兩種電機的控制都是調壓,只是由於無刷直流採用了電子換向,所以要有數位控制才可以實現,而有刷直流是通過碳刷換向的,利用可控矽等傳統類比電路都可以控制,比較簡單。
4.1 有刷馬達調速過程是調整供給馬達電源電壓的高低。調整後的電壓電流通過整流子及電刷轉換,改變電極產生的磁場強弱,達到改變轉速的目的,這一過程稱之為變壓調速。
4.2 無刷馬達調速過程是馬達的供電電源的電壓不變,通過微處理器改變驅動電路的控制信號,再改變大功率MOS管的開關速率,來實現轉速的改變。這一過程被稱之為變頻調速。
五、無刷電機控制原理
5.1 要控制無刷直流馬達,首先要知道轉子位置,控制器利用此資訊來協調與磁場相關的轉子線圈之供電,以確保馬達提供所需的回應,包括保持速度、加速、減速、改變方向、減小或增加扭矩、緊急停止或其他回應,具體取決於應用和操作條件。
5.2 轉子位置可直接使用位於轉子軸上的感測器或編碼器進行檢測。編碼器類型豐富,大致分為相對位置和絕對位置兩種;同時還有各種類型的感測技術,如磁線圈旋轉變壓器,或是霍爾效應、光學或電容感測器。根據解析度、耐用程度或成本等要求,這些類型的任何一種技術都可能適用既定的應用案例。
5.3 無感測器控制是一種可行的替代方法,它利用現有微控制器的運算能力,透過測量每個轉子繞組中的反電動勢來計算轉子位置。無需編碼器,因此可以節省材料成本、簡化組裝並提高可靠性。磁場導向控制(FOC)將轉子電流分解為D軸和Q軸分量,因為直流值變化緩慢,可以簡化控制挑戰,結合這種控制方法,無需感測器即可檢測轉子位置,這種檢測方式非常適合成本和可靠性比精度更重要的應用
六、直流無刷驅動器(健身器材業界統稱下控制器)
6.1 電機驅動控制就是控制電機的轉動或者停止,以及轉動的速度,電機驅動控制部分也叫做電子調速器
6.2 無刷電機外部還需要一個電子驅動器,這個驅動器就是一個無刷電機控制器,它隨時都在改變著固定線圈內部電流的方向,保證它跟永磁體之間的作用力是相互排斥及相互引力,如此線圈電流換向動作一直交換及重複,電機轉子(磁鐵)轉動才能得以延續。
6.3 有刷電機欲讓其轉動,直接把直流電供給電機的正極跟負級,電機就能自行轉動,無刷電機工作必須要有控制器,將直流電轉化為三相交流電,輸給無刷電機才能轉動。
6.4 從電機電力來源的角度來看,有刷電機電力來源就是直流電,無刷電機電力來源就是三相交流電。
6.5 三相交流電是電的一種傳輸形式簡稱三相電,是由3個頻率相同、振幅相等、相位依次互差120度的交流電壓組成的電源,三相電之電壓波形如下圖片
.png)
6.7 控制器內的MCU會以上控電子錶下發的轉速命令,進而對每一相輸出PWM信號,此PWM訊號的正脈寬寬度決定輸出電壓的大小配合PWM頻率的高低以及U V W各相PWM由LO轉HI的時間點(切向進角角度量)來控制電機的轉速及轉向,這就是無刷電子換相的原理。
6.8 在驅動電機運轉的時候,控制器的全橋電路內共有3組MOS管工作,每組2個MOS管一個控制正極輸出一個控制負極輸出,當正極輸出時負極不輸出,負極輸出時正極不輸出,這樣子也就形成了交流電,三組MOS FET都是如上述同樣運作的
.png)
6.10 淺談PSoC 3架構圖
PSoC 3架構具有豐富的無刷直流馬達控制功能,同時有多個PWM功能區塊以及監控和通訊功能。
.png)
MCP8024整合了一些重要的功能,例如三個額定電壓,以及電流高達12V和0.5A的半橋驅動器(具有針對高側和低側MOSFET的擊穿保護和獨立輸入控制),還有一個用於為配套微控制器供電的降壓轉換器。另外還有三個用於相電流監控和轉子位置檢測的運算放大器,一個過電流比較器兩個電平轉換器以及5V和12V 20mA的LDO穩壓器。更多的內建保護功能包括欠壓和過電壓鎖定、短路保護和過熱關機。這些廣泛的功能整合到一個小巧的40接腳5mm x 5mm QFN或48接腳7mm x 7mm TQFP封裝內。
MPC8024是高度整合的電源模組,設計用於控制外部MOSFET的閘極,從而控制針對無刷直流馬達的供電。
.png)
七、總結
無刷直流馬達已迅速成長為馬達類型首選,由於其高可靠性、多功能性、低雜訊和電氣干擾以及易於使用等特性,透過能以低成本微控制器或可程式化SoC實現的輕量化磁場導向控制策略即可對其進行控制,無論是否採用轉子位置感測器皆可,PSoC 3控制器與恰當的電源模組和電源開關相結合,整合先進馬達管理和監控功能電路,在健身器材這個需要機電整合技術性高的產業鏈,隨著無刷馬達生產工藝的成熟,以及控制技術演算法的精進,無刷系統儼然已經成為跑步機驅動系統的趨勢